For a piston with the crankradius, the rod length , the crankangle, and the crankangularvelocity, its velocity can be written as:
and its acceleration:
where .
A reciprocating engine derives its power from the vertical motion of a piston within individual cylinders of the engine. The up-down motion of the piston, also known as reciprocating motion, is converted into rotary motion by use of a crankshaft. Such a mechanism in motion can be seen in Figure 2, where the crankshaft is depicted with red, and the pistons with gray (to see the animation click on the thumbnail). Power transmitted such, requires constant motion of the piston within the cylinder from one extreme to the other. During this motion the velocity of the piston changes constantly; becoming zero at each extreme, and accelerating to a maximum value proportional to the engine RPM (rotations per minute).
Velocity And Acceleration Of A Piston
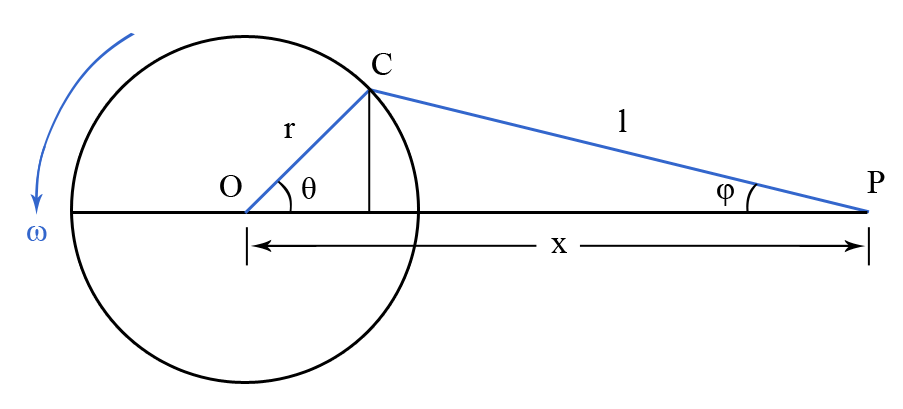
In order to define the velocity and acceleration of a piston, consider the mechanism in Figure 1, where the crank is driven with the uniform angular velocity . Also, let be the crank radius, the rod length, the position of the piston pin from the crank center, the angle, and the angle (the crank angle).
In order to calculate the piston velocity we differentiate (3) with respect to time, when we get:
The piston acceleration can then be calculated by differentiating again with respect to time, when we obtain:
Note that in these equations the positive direction of velocity and acceleration is away from the crankshaft.
In normal situations and can be neglected in comparison with , and thus, the above equations can be reduced to:
Example:
Example - Example 1
Problem
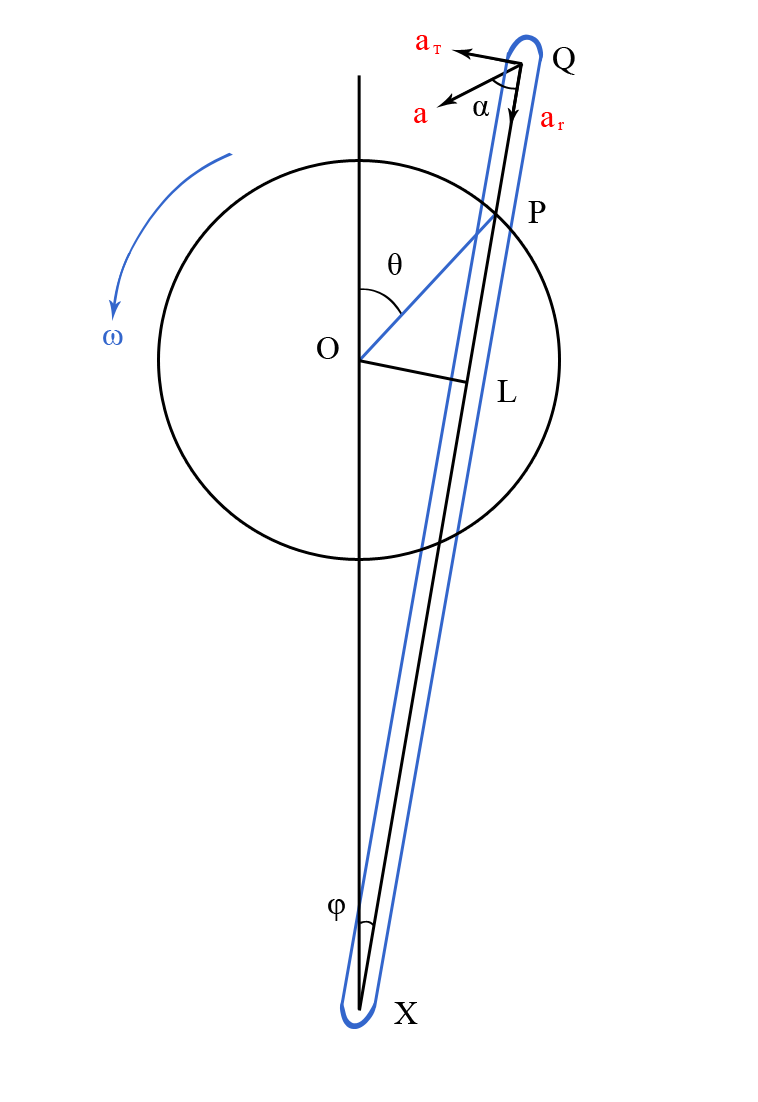
In the crank and slotted lever mechanism diagramed in Figure E1, the crank is driven at a uniform speed of radians per second.
If is the perpendicular from on , being the center-line of the slotted lever, prove that the angular acceleration of the slotted lever is given by:
Also, find the magnitude and direction of the acceleration of the point when the crank angle is , given that , , and .
Furthermore, by replacing numerical values in (3) and (5), we respectively get that:
In order to calculate the acceleration of , , we are going to split it in a tangential component, , perpendicular to , and a radial component, , in the direction of (see Figure E1). Also, let be the angle which defines the direction of the acceleration. We can write that:


 , the rod length
, the rod length  , the crank angle
, the crank angle  , and the crank angular velocity
, and the crank angular velocity  , its velocity can be written as:
, its velocity can be written as:
) and its acceleration:
and its acceleration:
) where
where  .
.
 is driven at a uniform speed of
is driven at a uniform speed of  is the perpendicular from
is the perpendicular from  on
on  ,
, )
 when the crank angle is
when the crank angle is  , given that
, given that  ,
,  , and
, and  .
.

) From which:
By differentiating (1) with respect to time, we get:
From which:
By differentiating (1) with respect to time, we get:
&space;\cos&space;(\theta&space;-&space;\phi)) Which leads to:
From Figure E1 we can write that:
Which leads to:
From Figure E1 we can write that:

) Thus, equation (2) becomes:
Thus, equation (2) becomes:
 Or:
By differentiating (2) with respect to time, we obtain:
By substituting
Or:
By differentiating (2) with respect to time, we obtain:
By substituting  in equation (4) with the expression from (3), we can write:
in equation (4) with the expression from (3), we can write:
&space;\omega^2&space;=&space;-OL&space;\left(&space;1&space;-&space;\frac{PL}{XP}&space;\right)&space;\omega^2) Or:
By replacing the numerical values in equation (1), we can write that:
As:
Or:
By replacing the numerical values in equation (1), we can write that:
As:
&space;=&space;3(\sin&space;60&space;\cos&space;\phi&space;-&space;\sin&space;\phi&space;\cos&space;60)) Equation (6) becomes:
Equation (6) becomes:
 Which gives:
Which gives:
 Thus, we get that:
Thus, we get that:
 And, by using this value, we also obtain that:
And, by using this value, we also obtain that:

&space;=&space;2.035&space;\;&space;inch)
 Furthermore, by replacing numerical values in (3) and (5), we respectively get that:
Furthermore, by replacing numerical values in (3) and (5), we respectively get that:

&space;=&space;-12.2&space;\;&space;\frac{rad}{s^2}) In order to calculate the acceleration of
In order to calculate the acceleration of  , we are going to split it in a tangential component,
, we are going to split it in a tangential component,  , perpendicular to
, perpendicular to  , in the direction of
, in the direction of  be the angle which defines the direction of the acceleration. We can write that:
be the angle which defines the direction of the acceleration. We can write that:

 From which we get the magnitude of acceleration:
From which we get the magnitude of acceleration:
 Also, as:
Also, as:
 We obtain the direction of acceleration:
We obtain the direction of acceleration:
