Consider the motion of a body in a viscous fluid in which the resistance to motion is proportional to the velocity. Suppose that the body has a weight W and that it is acted upon by a force acting towards x=0 by a constant force F and by a resistance Then applying Newtons Second Law the equation of motion is :
In this case the body oscillates with a period of . It can also be shown that successive amplitudes form a geometric progression and that the ratio of successive extreme positions on either sides of y=0 is . In other words the logarithmic decrement of the oscillation is .
If k=n the motion is critically damped and there will be no oscillations. Both roots of the auxiliary equation are equal to -k.
As are all positive and will tend to zero as t tends towards infinity. Thus in all three cases as t tends to infinity y tends towards zero and x tends towards b. As a result in case one the oscillations are damped out and the body will ultimately come to rest in its equilibrium position. In the second two cases there will be no oscillations and the body will come to rest in its equilibrium position. In some cases the body may pass through the equilibrium position before returning to it.
Forced Oscillations
If in addition to the force which causes Simple Harmonic Motion and the force which causes damping, the body is acted upon by a force the equation of Motion now becomes:
Thus z is the solution for free damped harmonic oscillations which we have already found in the previous paragraph. Therefore the solution of (10) is obtained by adding together u which is any particular solution and naturally depends upon f(t) and z which is the general solution for free oscillations. i.e. when there is no applied force f(t). We have already seen that the latter is damped out as t increases and hence the solution approaches x=u as t tends towards infinity. For this reason u is called the Steady State and the part z which dies away is called the transient.
In most cases the applied force is either a constant one or it s periodic of period . In which case f(t) is of the form and the steady state can be found by assuming a trial solution and finding A and B by making the resulting equation identically true, i.e. by making the coefficients of and the same on the left hand side of the equation as on the right. This method of finding A and B is shown in the following example.
Example:
[imperial]
Example - Damped Oscillation
Problem
A body which weighs 8 lbs. is acted upon by three forces
6.25x lb.wt acting towards x = 0.
A constant force of 2.5 lbs.wt.
A resistance of .
If and ft/sec at find x in terms of t when:
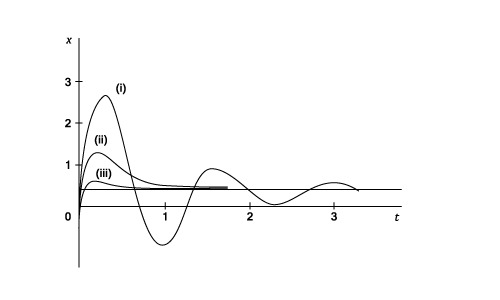
r = 0.7
r = 2.5
r = 6.5
Sketch a rough graph of x against t for the three cases.
This has one maximum value of approximately 1.3 at t = 0.23
The body will pass through the equilibrium position of x = 0.4 at t = 0.4/14 and then creep back to it again as t tend to infinity.
Third Case
In the third case r = 6.5 and the equations become:
This has one maximum value . The body passes through its
equilibrium position when and then creeps back to it as t tends to infinity.
Had a smaller initial velocity been taken than 16 ft./sec. it would have been found that when r >2.5
the body would never reach its equilibrium position until t was infinite but that when r <2.5 it
would oscillate just as before.


 and
and  ft/sec at
ft/sec at  find x in terms of t when:
find x in terms of t when:
.
If
and
at
whereThe Period of the oscillations is:Had there been no damping the Period would have been :which has equal roots of -5 If
This has one maximum value
. The body passes through its equilibrium position when
and then creeps back to it as t tends to infinity. Had a smaller initial velocity been taken than 16 ft./sec. it would have been found that when r >2.5 the body would never reach its equilibrium position until t was infinite but that when r <2.5 it would oscillate just as before.
) When r=6.5
When r=6.5