Differential equations are an powerful mathematical tool that help us understand nature and finance, allowing us to make accurate calculations, including:
movement of an object
the collision of two cars
trajectories of planets
As an example:
Imagine a particle that is projected horizontally (Gravity is neglected):
Velocity is given by
Acceleration is
It is assumed that the drag is proportional to
Applying Newton's second Law: "Force = Mass x Acceleration"
Therefore if we are interested in the distance x
or
If we are interested in time then:
Definitions
Particular solutions
When
and
When
and
Differential Equations which involve only one independent variable are called Ordinary.
In these equations x is the independent variable and y is the dependent variable.
For example :
Equations which involve two or more independent variables and partial differential coefficients with respect to them are called Partial. For example :
When
The Laplace equation
Order
Equations that involve a second differential coefficient but none of higher orders is said to be Second Order.
When
and
When
and
When
For example :
First order
Second order
Third order
Degree
The degree of an equation is the power of the highest differential coefficient once the equation has been made rational and integral as far as the differential coefficients are concerned. For example :
When
and
When
First degree
Second degree
Note that this definition of degree does not require x or y to occur rationally or integrally.
The Geometrical Meaning Of A Differential Equation
This section presents geometric characteristics of the solution of a differential equation .
Linear Solution
A linear function is a function such as
where
If then
Quadric Solution
A quadric function is a function such as
where
If then
Now consider the equation
Therefore
If A = 0 the graph is as above.
If A = 1
If A = -2
Exponential Solution
An exponential function is a function such as
where
Now consider the following equation:
This can be rearranged as:
The variables have now been separated and :
From which the explicit form is given by:
The Formation Of Differential Equations By Elimination
If from the following equation we eliminate the arbitrary constant we get the following:
Extending this concept, if we started with n arbitrary constants, we could eliminate them by n differentiations. The result would be a differential equation of the order.
Conversley if we are given a differential equation of the order we can, in general, obtain an equivalent relationship containing no derivatives but n arbitrary constants. This relationship is called "The General Solution"
For Example
where w i aconstant
Integrating with respect to x gives
And so on until
Where A, B, C and E are all arbitrary constants
The Complete Primitive; Particular Integral; And Singular Solution
The solution of a differential equation containing the full number of arbitrary constants is called "The Complete Primative". Any solution derived from the complete Primitive by giving particular values to these constants is called a "A Particular Integral"
For example
A Particular solution of
is given by
(Obtained by putting A,B,C,E = 0)
or
Example:
Example - The use of Differential Equations to Solve Problems in Dynamics
Problem
A cricket ball is thrown vertically upwards with a velocity of v ft/sec. The retardation is or . Find the maximum height reached (Y) and the time of flight to the vertex (T).
Prove that the Initial velocity u is given by:
Workings
The acceleration = -kv - g
To find the time of Flight T
thus
When t = 0 v = u
Thus
At the vertex t = T and v = 0 so
i.e.
For Height Y
But when y = 0, v = u so
At the Vertex v = 0
Solution
The flight time is:
Max Height is:
Differential Equations Which Include Trigonometrical Functions The Right Hand Side
In the following worked examples is usually re-written as
. For those unused to this type of trigonometrical
manipulation, the following notes should help.
Example:
Example - Basic examples .
Problem
Basic trigonometrical examples
Workings
The reference page on Trigonometrical Formulae includes:-
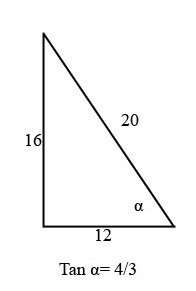
we can compare the right hand side with the right hand side of (5) and we can see that they are of
the same form but has been replaced by "3" and by "4". Clearly this
can not be correct as the Sine and Cosine can not have a value above unity but if we draw the
following right angled triangle.
Values of Sine and Cosine can be obtained which can be put into equation (5)



 Therefore if we are interested in the distance x
Therefore if we are interested in the distance x
 or
or
 If we are interested in time then:
If we are interested in time then:


=at) and
and 
=t^2+c) and
and 

 Equations which involve two or more independent variables and partial differential coefficients with respect to them are called Partial. For example :
Equations which involve two or more independent variables and partial differential coefficients with respect to them are called Partial. For example :

^2&space;\right]^{\frac{3}{2}}&space;=&space;3\,\frac{d^2y}{dx^2})
 Third order
Third order

 such as
such as
=ax^2+bx+c) where
where 
 then
then 
 Therefore
Therefore 

 such as
such as
=e^{ax}) where
where ) This can be rearranged as:
This can be rearranged as:  The variables have now been separated and :
The variables have now been separated and :

}&space;=&space;e^{\frac{1}{2}x^2}&space;&space;+&space;e^c) From which the explicit form is given by:
From which the explicit form is given by:

 is given by
is given by
 (Obtained by putting A,B,C,E = 0)
or
(Obtained by putting A,B,C,E = 0)
or

 or
or  . Find the maximum height reached (Y) and the time of flight to the vertex (T).
Prove that the Initial velocity u is given by:
. Find the maximum height reached (Y) and the time of flight to the vertex (T).
Prove that the Initial velocity u is given by:

)
 thus
thus
\;=&space;-&space;t&space;+&space;c) When t = 0 v = u
When t = 0 v = u
&space;=&space;0&space;+&space;c)
\;=&space;-&space;t&space;+&space;\frac{1}{k}Ln\,(ku&space;+&space;g)) Thus
Thus
) At the vertex t = T and v = 0 so
At the vertex t = T and v = 0 so
) i.e.
i.e.
) For Height Y
For Height Y
)
}=&space;-&space;dy)


=&space;-&space;y&space;+&space;D) But when y = 0, v = u so
But when y = 0, v = u so
&space;=&space;0&space;+&space;D)
=&space;-&space;y&space;+&space;\frac{1}{k}u&space;-&space;\frac{g}{k^2}\,Ln(ku&space;+&space;g)) At the Vertex v = 0
At the Vertex v = 0
)
)
)
)
)
 has been replaced by "3" and
has been replaced by "3" and  by "4". Clearly this
can not be correct as the Sine and Cosine can not have a value above unity but if we draw the
following right angled triangle.
by "4". Clearly this
can not be correct as the Sine and Cosine can not have a value above unity but if we draw the
following right angled triangle.
 can be obtained which can be put into equation (5)
This can be re-arranged to satisfy the requirements of equation (6)
can be obtained which can be put into equation (5)
This can be re-arranged to satisfy the requirements of equation (6)

