

Physics › Kinematics ›
Linear Velocity and Acceleration
Introduction to linear velocity and acceleration with an emphasis on constant acceleration.
Introduction
Key facts
Velocity is the rate of change of position with respect to time: Acceleration is the rate of change of velocity with respect to time:
Acceleration is the rate of change of velocity with respect to time:
)
)
 If
If  is the initial velocity,
is the initial velocity,  the final velocity, and
the final velocity, and  the distance traveled in a time
the distance traveled in a time  , then:
, then:

 and
and

Velocity is the rate of change of position with respect to time:
Velocity and acceleration are vector quantities both measured with respect to time, where acceleration is the rate at which the object changes its velocity. Constant acceleration, the term in consideration here, assumes that the rate of change of velocity over a period of time is constant. In other words, if you were in a bus that was in a state of constant acceleration, we would say that the bus was either speeding up or slowing down at a steady, constant rate. From this approximation, the position, speed and final velocity due to the acceleration can be calculated.
Linear Velocity
In order to define linear velocity, consider a particle moving in a straight line from a fixed point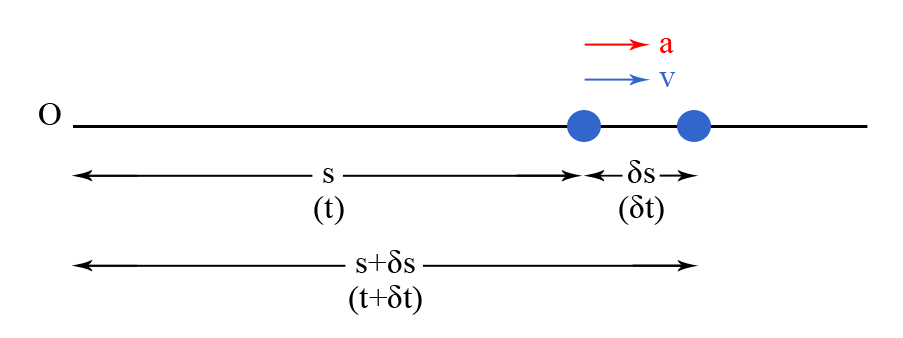
Constant Acceleration
LetExample:
[imperial]
Example -
Problem
The driver of an express train traveling at 60 mph sees, on the same track, 600 ft in front of him, a slow train traveling in the same direction at 20 mph.
What is the least retardation that must be applied to the express to avoid a collision?
What is the least retardation that must be applied to the express to avoid a collision?
Workings
For the express train,  , and
, and  . Taking into account that
. Taking into account that  , we get:
, we get:

 , we get:
Combining (1) and (2), we thus obtain:
, we get:
Combining (1) and (2), we thus obtain:
&space;\right])
In a time the slow train will have traveled a distance of
. The express train will have gone further and will have traveled
:
from which:
Solution