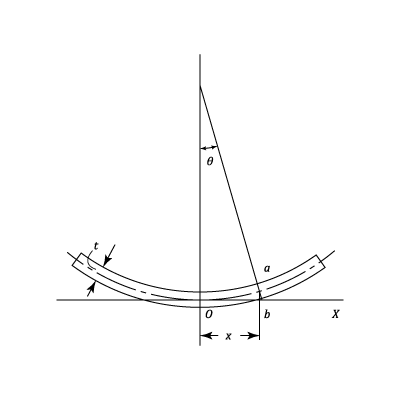
Consider a Diametral Section through a plate of thickness . is the centre of the plate and and are the principal axes in the plane of the diagram. The axis is perpendicular to the screen.
Let be the Centre of Curvature of a section at a distance from . Then if the deflection is small:
(Approximately)
If is the distance of any "fibre" from the neutral axis (which is assumed to be central) then proceeding as for "Pure Bending" in the planes and the linear Strains are:
Where and are the Stresses in the directions and , is zero
Solving equations (4) and (5) for the Stresses and incorporating equations (2) and (3) gives:
The diagram shows the Forces and Moments per unit length acting on an element which subtends an angle at the centre. is the Shearing Force per unit length in the direction of .
Now consider the equilibrium of the Couples in the Central Radial Plane.
i.e.,
Which in the Limit reduces to:
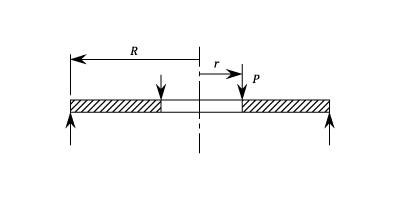
Let the radius of the plate be and the thickness .
Uniformly Loaded, Edge Freely Supported
and since and can not be infinite at the centre, then from Equation (13) at , , and therefore from equation (14).
Using equations (8) and (13). At , therefore
As above when , . Therefore Note: the Maximum Stresses occur at the centre.
Uniformly Loaded With The Edge Clamped
As in the last case, and at , . Therefore from equation(14)
Structural loads or actions are forces, deformations or accelerations applied to a structure or its components.Loads cause stresses, deformations and displacements in structures.
These Stresses appear to become infinite at the centre, but it must be realised that the load can not be applied at a point but must extend over a finite area. If this area can be estimated then the maximum Stresses can be obtained.
Loaded Round A Circle, Edge Freely Supported
Let a total load be distributed around a circle of radius .
It is necessary to divide the plate into two regions, one for and the other for . At the values of , and must be the same for both regions.
If , and
Hence, from Equation (13) .
And from Equation (14),
Since and are not infinite at then , and since when and , then above equations reduce to:
And,



and since
and
can not be infinite at the centre, then
from Equation (13) at
,
, and therefore
from equation (14). Using equations (8) and (13). At
,
therefore
Thus,Central Deflection =by substitution from Equation (9)
From Equation (6)And atFrom Equation (7)As above when,
. Therefore
Note: the Maximum Stresses occur at the centre.
. Therefore
therefore from equation (13)
At
Thus, Central deflection
From Equation (6)Note:And from equation (7),
These Stresses appear to become infinite at the centre, but it must be realised that the load can not be applied at a point but must extend over a finite area. If this area can be estimated then the maximum Stresses can be obtained.be distributed around a circle of radius
.

and the other for
. At
the values of
must be the same for both regions.
,
and
. And from Equation (14),
Since
And,
and
And from Equation (14),
Equating the values ofgives the following equations:
And,and by substitution equation (14) reduces to: