

Moments of Inertia
Worked examples involving Bending Stess and Moments of Inertia.
Overview
Bending moment refers to the algebraic sum of all moments located between a cross section and one end of a structural member; a bending moment that bends the beam convex downward is positive, and one that bends it convex upward is negative.
The General Equation for bending is used throughout. The proof of this is to be found in "Engineering/Materials/Bending Stress". For convenience the equation is written here and is as follows:
 Where
Where
is the Bending Moment
is the Moment of Inertia of the section
is Young's Modulus
is the Radius of curvature
is the stress at a distance
from the Neutral Axis
Example:
[imperial]
Example - Example 1
Problem
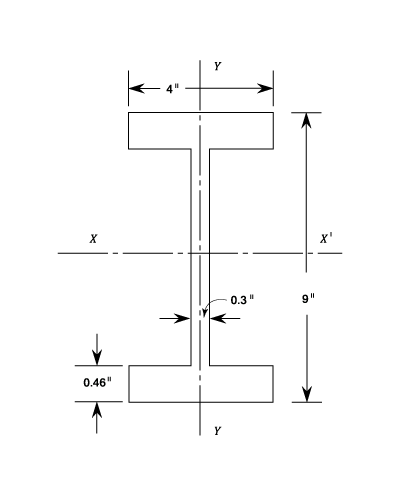
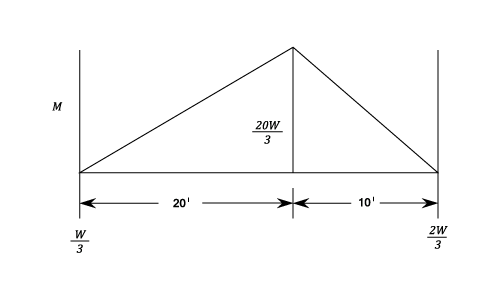
The beam of a symmetrical section is simply supported over a span of 30 ft.
If the maximum permissible stress is 5 tons/sq.in., what concentrated load can be carried at a distance of 10 ft from one support?
Workings
Solution