DefinitionsInertia is the resistance of any physical object to a change in its state of motion or rest, or the tendency of an object to resist any change in its motion.
Linear velocity is the velocity along a straight line, and its magnitude is commonly measured in such units as meters per second (m/s), feet per second (ft/s), and miles per hour (mi/h).
The angular velocity is a vector quantity (more precisely, a pseudovector) which specifies the angular speed of an object and the axis about which the object is rotating.
Key Facts
The purpose of Balancing Inertia forces in high speed rotating machines and engines is to avoid putting components under high bearing loads and stresses, and eliminating harmful vibrations (Hammer Blows).
Balancing Rotating Masses with the help of balance weights, for masses in:
A Single Plane.
Parallel Planes.
Analysing inertia forces (Primary and Secondary) in Reciprocating masses.
Primary and Secondary Balance for Multi-Cylinder In-line engines.
Examining the balance of radial engines in forward and reverse crank motions.
The high speeds of rotation at which modern machines and engines are required to operate has made it increasingly important that all revolving and reciprocating parts are as completely balanced as possible.
Not only are the bearing loads and stresses in components increased by out of balance dynamic forces, but there is also the possibility of causing significant harmful vibrations. On the railways these were called Hammer Blows, and they were reduced by casting balancing weights into the driving wheels.
These can be clearly seen in the photograph at the bottom of the wheels
Road transport wheels are routinely balanced by adding small weights around the rim. These improve wheel bearing life, but more importantly prevent vibrations from being set up in the steering system; which are at best unpleasant and at worst very dangerous.
It would be wrong to assume that all vibrations caused by out-of balance forces are undesirable, since they are used to agitate liquids or to prevent granular solids from "sticking".
Rotating Masses In One Plane
When a mass , attached at a radius to a shaft, is rotated with an angular velocity , there is an outwards radial force of . This produces a bending moment in the shaft. To counteract the effects of this inertia force, a balance weight may be introduced into the plane of rotation of the original mass, such that the inertia forces of the two masses are equal.
If is the weight of the balancing mass and its radius of rotation,then:
or Note: It is normal to make as large as possible since this reduces the value of .
If a system of several rotating masses is attached to the same shaft, the effect is equivalent to a set of concurrent forces. Since is the same for all the masses attached to one shaft, the centrifugal forces are proportional to (or ), and the problem can be solved graphically by means of a polygon of forces, or analytically by resolving in two directions.
If the masses are going to be balanced, the polygon must close. Note that the polygon can be drawn for any particular angular position of the shaft carrying the masses and will rotate as a whole with the shaft.
Rotating Masses In Parallel Planes
Again, each mass exerts an outwards centrifugal force proportional to . The forces are equivalent to a set of exactly similar forces in one chosen plane (the reference plane), together with a set of couples proportional to ; where is the distance from the plane of to the reference plane. It is necessary to reckon positive to one side of the reference plane and negative to the other.
The forces are balanced as before by drawing a force polygon. This tests for Static Balance. Similarly, the couples can be represented by vectors drawn in the radial direction and can be balanced by drawing a Couple Polygon . Negative couples are drawn in a direction that is radially inwards. If the polygon closes, then the system is in dynamic balance. If it does not close,then the gap represents the out-of balance moment about the reference plane.
Note. It is only a pure couple if there is no out-of-balance force. Static balance can be obtained without dynamic balance but the reverse is not true. (See Example 3)
Reciprocating Masses
The Inertia Force of a rotating mass is:
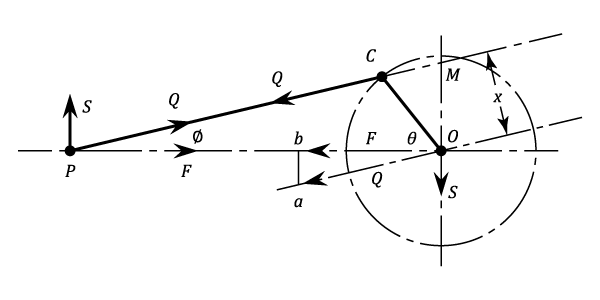
This force is provided by the pull of the connecting-rod and with reference to the following diagram:
The connecting-rod is in tension and the force applied by the rod to the crank pin is equivalent to an equal and parallel force through , together with a couple ..
The Couple .. tends to retard the rotation of the crankshaft and its effect is taken into account when finding the net turning moment on the crankshaft.
The force at is transmitted from the crankshaft through the main bearings and into the engine frame.
Both the force at and that at may be resolved parallel and perpendicular to the line of stroke. The horizontal components are equal and opposite.
The one acting through accelerates the reciprocating parts.
The other through , is an unbalanced force applied to the frame and causes the frame to slide backwards and forwards on its mountings as the crank rotates.
The two vertical components are equal and opposite and constitute a couple applied to the frame which attempts to rotate the frame in a clockwise sense.
As the triangles and are similar:
Since . Therefore, Also, And . So that Therefore, and
The full effect of the inertia of the reciprocating mass on the engine frame, is equivalent to a force along the line of stroke at , and to the clockwise couple of magnitude .
The Inertia Force can be separated into two parts:
is called the Primary Force.
which is called the Secondary Force
It is clear that the primary force is equivalent to the component along the line of stroke of the centrifugal force due to an equal mass rotating with the crank and at crank radius. Consequently, in the case of a single-cylinder engine, the primary reciprocating force could be balanced by a rotating mass on the other side of the crank pin. However, this would introduce an unbalanced component of the centrifugal force of magnitude perpendicular to the line of stroke. A compromise solution (partial balance) is usually applied, the inertia force being reduced to a minimum when 50% of the reciprocating mass is balanced.
The secondary force is similarly equivalent to the component of the centrifugal force of mass at radius of rotating at being coincident with the crank at inner dead-centre.
Multi-cylinder In-line Engines
The usual arrangement for multi-cylinder engines is to have the cylinder centre lines all in the same plane and on the same side of the crankshaft centre line. This constitutes an "In-line" engine.
Notable exceptions to this rule are Vee engines in which there are in effect two banks of in-line cylinders, and Flat engines in which half the cylinders are arranged on opposite sides of the crankshaft.
Assuming that and are the same for all cranks, they can be omitted from all considerations of engine balance, but they must be included when actual values are required.
Primary Balance
For couples and forces to be in balance:
And (For all values of .)
The equations can be solved analytically or by polygons drawn in the relative crank directions. This is similar to those used for rotating balance.
Any gap remaining in the force or couple polygons represents (to a certain scale) the maximum out-of-balance value. This occurs twice per revolution of the crank-shaft when its direction lies along the line of stroke.
Secondary Balance
For complete balance:
And
To solve graphically it is only necessary to draw vectors in the directions (i.e. relative to any one crank taken as zero) and repeat it for primary balance.
The Partial Balance Of Two-cylinder Locomotives
It is normal for the cranks to be at right angles and as a result the secondary forces are small and in opposite directions. As a result they are usually neglected and only the primary forces and couples are considered.
It is usual to balance about two-thirds of the reciprocating parts with masses fixed to the wheels.
The unbalanced vertical components of the reciprocating masses give rise to a variation of rail pressure known as Hammer Blow and a Rocking Couple about a fore and aft horizontal axis.
The unbalanced reciprocating masses cause a variation in draw-bar pull and a swaying couple about a vertical axis ( See examples 12 and 13).
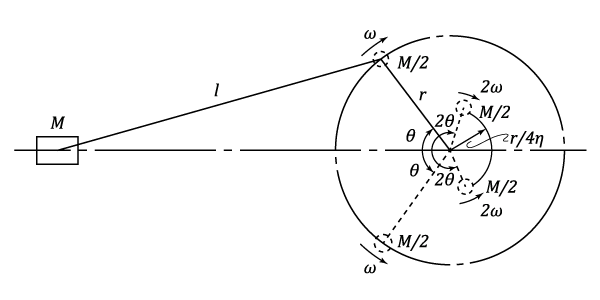
Radial Engines - Direct And Reverse Cranks
The primary force for a reciprocating mass is equivalent to the resultant of the centrifugal forces of two masses rotating at a crank radius and at a speed , one in the forward direction of motion and the other in the reverse direction. Note that the "direct" and "reverse" cranks are equally inclined to the dead centre position.
Similarly, the secondary force can be represented by direct and reverse cranks inclined at to the inner dead centre and each carrying a mass at a radius of rotating at a speed of .
This method is particularly useful for examining the balance of radial engines with a number of connecting rods attached to the same crank. It is usually assumed that the crank and connecting rod lengths are the same for each cylinder, though from a practical consideration of design this is not generally true (see Example 11).
Example:
[imperial]
Example - Example 1
Problem
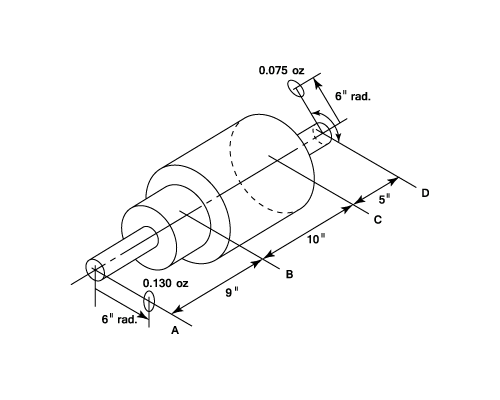
A motor armature is in running balance when weights of 0.130 oz. and 0.075 oz. ( There are 16 oz. in 1 lb.) are added temporarily in the positions shown in the planes and in the diagram.
If the actual balancing is to be carried out by the permanent addition of masses in the planes and each at 4 in radius, find their respective magnitudes and angular positions to the radius shown in plane .
Workings
The problem is to determine the masses in the planes and which will provide the same resultant force and couple , when rotating, as the given masses in the planes and .
It is possible to eliminate one of the "unknowns" (say ) by taking as the reference plane. The following table can now be constructed. The figures in bracket are added as and when they are calculated.
The polygon can now be drawn. Note that is negative.
The angular position and magnitude of for can now be measured since is the resultant of and
The value of is now for divided by the appropriate value of . With this information the Force polygon can be constructed in which and give the same resultant as and .
Solution
The value and angular position of can now be added to the table.
The required magnitudes of and are calculated by dividing by the corresponding value for .




 is:
is:
)
applied by the rod to the crank pin
is equivalent to an equal and parallel force through
, together with a couple
.
may be resolved parallel and perpendicular to the line of stroke. The horizontal components are equal and opposite.
 and
and  are similar:
are similar:
 . Therefore,
. Therefore, 

 . So that
. So that 
 and
and 

is called the Primary Force.
which is called the Secondary Force
And
(For all values of
.) The equations can be solved analytically or by polygons drawn in the relative crank directions. This is similar to those used for rotating balance. Any gap remaining in the force or couple polygons represents (to a certain scale) the maximum out-of-balance value. This occurs twice per revolution of the crank-shaft when its direction lies along the line of stroke.
And
To solve graphically it is only necessary to draw vectors in the directions
(i.e. relative to any one crank taken as zero) and repeat it for primary balance.
 and
and  in the diagram.
in the diagram.
 and
and 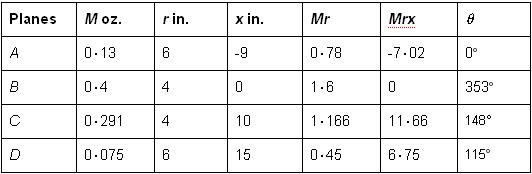
polygon can now be drawn. Note that
value of
can be constructed in which
.