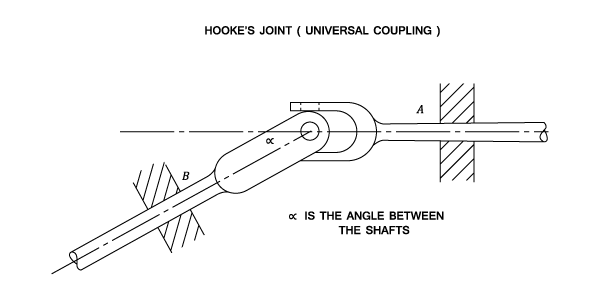
This submission, the first in a number planned for "The Theory of Machines" introduces Forces in Mechanisms, including The Friction Circle and The concept of Instantaneous Centres and velocities within a Mechanism. An analysis of Hooke's Universal Coupling is given. In addition a number of worked examples are included to illustrate the theory.
In order to study The Theory of Machines it is necessary to understand what is meant by a machine. In simple terms it is a contrivance which receives energy in some available form and uses it to do some particular kind of work. A crowbar together with its fulcrum forms a machine which enables the muscular energy of a man to raise a heavy weight.
Each part of a machine which has motion relative to another part is termed An Element or Link. It is important to realise that an element may consist of several separate components fixed rigidly together (e.g. The connecting rod of an engine complete with the bearings and end caps and bolts is one element).
A kinematic Pair represents two bodies which are in contact and there is relative motion between them. If the motion is one of sliding between surfaces in contact ( e.g. cross-heads in guides, Shafts in bearings, A screw and nut), it is known as A lower Pair. When the contact takes place along a line ( e.g. a Cam and follower or toothed gearing) it is called A higher pair.
A kinematic Chain is a combination of Kinematic Pairs which have been so joined together that the relative motion between the Elements is completely determined.
A Mechanism is obtained if one link of a Kinematic Link is fixed. Differing Mechanisms may be obtained by fixing different elements of the same chain. These are called inversions . For example The slider-crank chain (Engine Mechanism) becomes an oscillating-cylinder mechanism if the original "connecting-rod" is fixed, or a Whitworth "Quick-return mechanism" if the crank becomes the fixed link.
An Internal Combustion energy converts the chemical energy of the fuel to produce motion or mechanical work and a lathe is a machine which uses electrical energy to remove metal from the work piece. It is also necessary to know and understand the terms used in this subject.
Instantaneous Centre
At any particular moment the motion of a body moving in a plane can be defined as pure rotation about a point, known as The instantaneous centre of rotation. If is the angular velocity of the body and is the instantaneous centre of rotation , then the velocity at any point on the body is in a direction perpendicular to .
With the exception of Bodies which are rotating about fixed centres, the Instantaneous Centre will be a point moving relative to the body. When the directions of Motion of two points on a Body are known, the Instantaneous Centre is at the intersection of lines through the points perpendicular to these directions.
The Relative Instantaneous Centre of two bodies is the point about which either of them appears to turn at that instant, if the other is considered fixed. Examples of this are:
Where two links in a mechanism are pinned together, the pin-joint becomes the relative instantaneous centre.
Where two bodies are in pure rolling contact, the point of contact is the relative instantaneous centre.
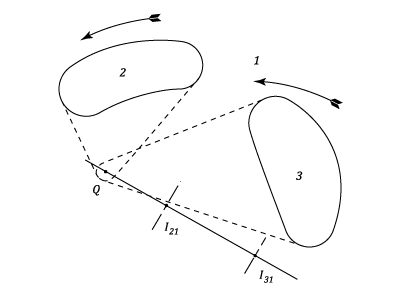
It will be shown that the three instantaneous centres due to the relative motion of any three elements in a mechanism are in a straight line.
Proof of The Three-in-line Theorem
Let the screen represent body 1 and let and be the respective instantaneous centres of body 2 relative to body 1 and body 3 relative to body 2. The instantaneous centre of body 3 relative to body 2 is that point which at a given instant is moving with the same velocity whether considered to be fixed to body 3 or as fixed to body 2. It can be seen that only those points on the bodies 2 and 3 which lie on the line (produced if necessary) can be moving in the same direction at the given instant. Let be a point on the extension of . Then is at right angles to when is considered to be a fixed point on body 2. Also is at right angles to when is considered to be a point on body 3. Then,
where are tangular velocities of the bodies 2 and 3 relative to body 1.
If this condition is satisfied, then the point coincides with the instantaneous centre of the body 3 relative to body 2.
It should be noticed that for a kinematic chain with links, the total number of instantaneous centres will be equal to the number of different combinations of links in pairs
Apart from the use of Instantaneous Centres, velocity can also be determined by differentiating the angular or linear displacement of a point. Acceleration can of course be found from the second differentiation.
Angular Displacement, Velocity And Acceleration
Let,
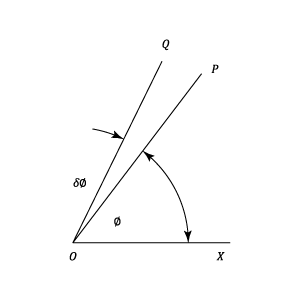
The line in the diagram rotate around
Its inclination relative to be radians.
If after a short period of time the line has moved to lie along , then the angle is The Angular Displacement of the line.
Angular Displacement
Angular Displacement is a vector quantity since it has both magnitude and direction. The vector must fix:
The direction of the axis of rotation in space.
The sense of the angular displacement. i.e. whether clockwise or anti-clockwise.
The magnitude of the angular displacement.
In order to fix the vector, it can be drawn at right angles to the plane in which the angular displacement takes place. Say this is along the axis of rotation and its length is, to a convenient scale,the magnitude of the displacement.
The conventional way of representing the sense of the vector , is to use the right-hand screw rule. i.e.,
The arrow head points along the vector in the same direction as a right handed screw would move, relative to a fixed nut.
Using the above convention, the angular displacement shown in the diagram would be represented by a vector perpendicular to the plane of the screen and the arrow head would point away from the screen.
Angular Velocity
This is defined as the rate of change of angular displacement with respect to time.
As angular velocity has both magnitude and direction it is a vector quantity and may be represented in the same way as angular displacement.
If the direction of the angular displacement vector is constant. i.e., the plane of the angular displacement does not change its direction, then the angular velocity is merely the change in magnitude of the angular displacement with respect to time.
Angular Acceleration
It is defined as the rate of change of angular velocity with respect to time. It is a vector quantity.
The direction of the acceleration vector is not necessarily the same as the displacement and velocity vectors.
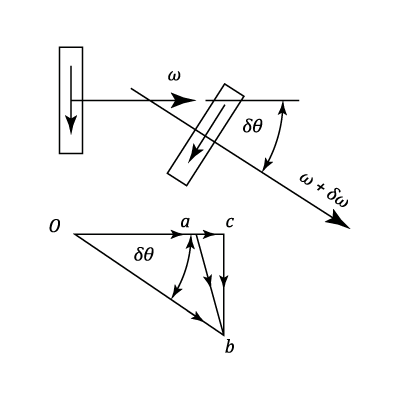
Assume that a given instant a disc is spinning with an angular velocity of in a plane at right angles to the screen and that after a short interval of its speed has increased to .
The change in direction of the plane of rotation of the disc is known as Precessional motion, and is known as the angular velocity of precession.
The angular acceleration is called the Gyroscopic acceleration.
Then applying the right-hand rule:
The angular velocities at the two instants are represented by the vectors and .
The change of angular velocity in a time of is represented by the vector . This can be resolved into two components and which are respectively parallel and perpendicular to .
Hence,
The component parallel to is given by
The component perpendicular to is given by
Note:
is the rate of change of direction of the vector
is the rate of change of the magnitude of the velocity of the disc.
is the rate at which the direction of and therefore the plane of the rotation of the disc is changing.
The total angular acceleration of the disc is the vector sum of and
Two particular cases should be noted:
If the plane of rotation of the disc is constant in direction, then is zero and the component of acceleration is zero.
If the angular acceleration of the disc is constant in magnitude but the plane of rotation changes direction at the rate radians per second, then the angular acceleration of the disc is given by:
The direction of this acceleration vector is at right angles to the angular velocity vector and lies in the plane of motion of the velocity vector.
Forces In Mechanisms.
The forces acting on the individual links of a mechanism can be analysed using the laws of Statics. Inertia forced must either be neglected or allowed for by using the methods shown under Inertia Forces and Couples. Each link is in equilibrium under the action of the external forces acting on it and the reactions at points of contact with other links. The following principles apply:
Action and reaction between two bodies must be equal and opposite.
If a body is acted upon by forces at two points only then these forces must be not only equal and opposite but in the same line. e.g. the reactions at each end of a link connected by single pin joints to adjoining links and not acted upon by any external forces must be equal and in the direction of the line between the pin joints.
If a body is acted upon by three forces only then these must pass through a common point
In general for a body in plane motion, three conditions of equilibrium can be obtained by resolving and or taking moments.
Note. If only the input and output forces on a mechanism are required it is often possible to use the principles of work (or power) to give results directly without considering intermediate forces.
Friction
Smooth surfaces are defined by the properties that when they are in contact, the surface is always perpendicular to their common tangent plane.
It can, however, be verified experimentally that no surface is perfectly smooth and that whenever there is a tendency for two bodies which are in contact to move relative to each other, a force known as the force of friction tends to prevent the relative motion.
The mathematical discussion of the force of friction depends on certain assumptions which are embodied in the so called laws of friction, and are found to be in close agreement with experiments.
Law 1 When two bodies are in contact the direction of the forces of Friction on one of them at it's point of contact, is opposite to the direction in which the point of contact tends to move relative to the other.
Law 2 If the bodies are in equilibrium, the force of Friction is just sufficient to prevent friction and may therefore be determined by applying the conditions of equilibrium of all the forces acting on the body.
The amount of Friction that can be exerted between two surfaces is limited and if the forces acting on the body are made sufficiently great, motion will occur. Hence, we define limiting friction as the friction which is exerted when equilibrium is on the point of being broken by one body sliding on another. The magnitude of limiting friction is given by the following three laws.
Law 3 The ratio of the limiting friction to the Normal reaction between two surfaces depends on the substances of which the surfaces are composed and not on the magnitude of the Normal reaction. This ratio is usually denoted by Thus, if the Normal reaction is , the limiting friction is For given materials polished to the same standard is found to be constant and independent of . is called the coefficient of friction.
Law 4 The amount of limiting friction is independent of the area of contact between the two surfaces and of the shape of the surfaces, provided that the Normal reaction is unaltered.
Law 5 When motion takes place the direction of friction is opposite to the direction of relative motion and independent of velocity. The magnitude of the force of friction is in a constant ratio to the Normal reaction but this ratio may be slightly less than when the body is just on the point of moving.
It should be stressed that the above laws are experimental and are accepted as the basis for the mathematical treatment of friction. Modern theory suggests that the force of friction is in fact due to the non - rigidity of bodies. When one body rests on another, there is always an area of contact, which is much smaller than the apparent area and also depends on the the normal pressure between the bodies. Friction is considered to be due to the fusion of materials (of which the bodies are composed) over the area of contact. Therefore, friction would be proportional to the area of contact, and therefore proportional to the normal pressure as assumed in the above laws.
Angle Of Friction
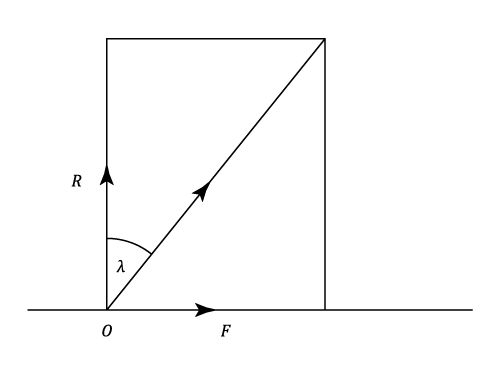
Let be the normal reaction at a point of contact and the frictional force acting in a direction perpendicular to . Then the total force at is given by
(1)
acting in a direction making an angle
(2)
with the normal reaction.
If friction is limiting, and the action at makes an angle of tan^{-1} with the normal reaction. This angle is denoted by .
Thus
(2)
and the magnitude of the limiting friction can be found if either or is known.
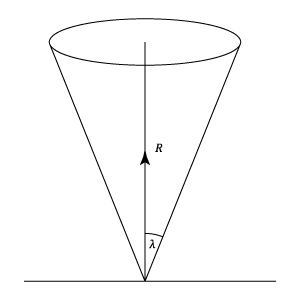
If the direction in which the body tends to move is varied then the force of limiting friction will always lie in the plane through perpendicular to the normal reaction and the direction of the total action at will always lie on a cone with it's vertex at and axis along the line of the normal reaction. The semi vertical angle will be .
This cone is called the cone of friction.
The Friction Circle And Friction Axis
For a turning pair ( Shaft and Journal or Pin and Bearing) it is assumed that contact is along the axial line and that the total reaction will pass through the position of contact. Diagram (a) shows the forces when the shaft is at rest.
It is assumed that there is no friction and the only two forces are and the reaction . When movement occurs, the Total Reaction must be inclined at the Friction angle and this can only be achieved if the Point of Contact moves to a position as shown in Diagram (b). As Friction must oppose movement the Point of Contact will move around the Pin against the Direction of Motion.
The Total Reaction will always be Tangential to a Circle centre and radius (Approx. ) . This is known as The Friction Circle.
Where a Link joins two turning pairs, the line of thrust or Tension in the Link must be Tangential to the Friction Circles at its ends. This line is called The Friction Axis.
Friction Torque = (Approx )
Example:
[imperial]
Example - Example 1
Problem
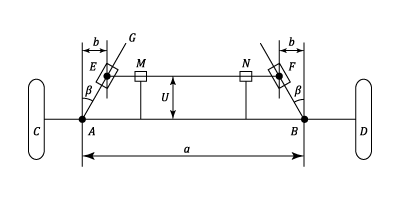
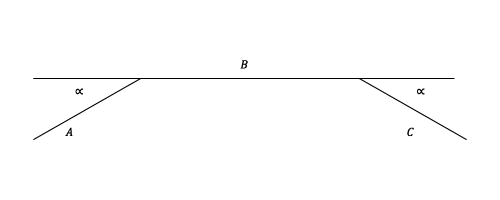
In the Davies Steering gear shown, the stub Axles and are pivoted at and on the rigid axle and are continuous with the arms and respectively. The cross link is pivoted at the ends to the blocks sliding on the arms and and slides in the guides at and .
Show that correct steering is obtained if the distance between the front and rear axles is
Workings
Let the Cross link move to one side by a distance . As a result the stub axles will turn through angles of and .
Similarly from which:
For Correct Steering all the wheels must have Pure Rolling Motion and as a result the Instantaneous Centre must be on the line of the Back Axle.
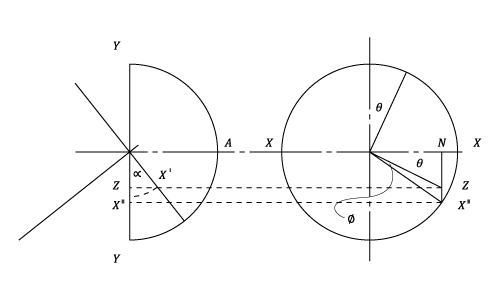
The diagrams show a Hook's joint in which shaft drives shaft through an angle of
Starting position
The cross arms and are in a plane perpendicular to . Now turn through an angle theta Project onto the original plane at . Note angle is always a right angle.
Rotate the plane of ' about , bring
' to '' and to ''. The angle turned through by (and hence ) is
Differentiating,
Assume that is driving so is constant
The acceleration of , ( Assuming that is constant)
Example:
[imperial]
Example - Example 1
Problem
If the angle of divergence of a Hooke's joint is 27 degrees and a steady torque of 220 lb.ft. is applied to the driving shaft whilst it is rotating at 120r.p.m., what must be the weight of the flywheel (radius of gyration 9 in.) attached to the driven shaft, if the output torque does not vary by more than plus or minus 25%?
Workings
The value of for maximum acceleration of the driven shaft may be taken from:
i.e. or and or
Using equation (1) - from Example 1
Speed ratio = at both angles
Thus the transmitted torque =
Permissible acceleration torque, , equals the transmitted minus the output torques
From equation (2)-from Example 1
i.e.
Solution
The weight must be
Double Hooke's Joint
and
Then for all values of
i.e. the shaft angle to is two alpha and the intermediate shaft makes an angle with both and .
NOTE: The cross arms attached to and must be in the same plane.
Example:
[imperial]
Example - Example 1
Problem
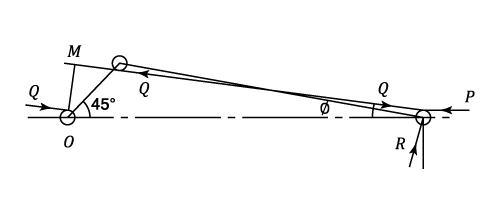
In a direct acting steam engine the stroke is 2 ft. and the diameter of the piston is 1 ft. The length of the connecting-rod is four times the length of the crank. The diameters of the crosshead pin, crank pin and crankshaft are 3.5, 4.5, and 5.0 inches respectively. The coefficient of friction between the crosshead guide is 0.08 and for the two pins and crankshaft is 0.055. When the crank has moved through an angle of from the inner dead centre the effective steam pressure on the piston is 100 lb./sq.in.
Draw a diagram to show the direction of the forces acting in the linkwork and calculate the turning moment on the crankshaft.
Workings
The diagram shows the forces acting, being the thrust in the connecting rod. Note that the gudgeon pin is rotating anticlockwise relative to the small end bearing, so that is tangential to the friction circle ( Which is not drawn to scale) i.e. Contact has moved around the pin against the direction of relative motion. It can also be seen that the relative motion of the crank pin in the big end bearing is also anticlockwise and the point of contact has therefore moved clockwise around the bearing. is therefore tangential to the friction circle. The crankshaft bearing load must also be and as the motion of the shaft is anticlockwise, is tangential to the friction circle as shown. The turning moment on the crankshaft is
The distance from the gudgeon pin to the crankshaft is given by:
The inclination of the connecting rod centre line to the connecting-rod axis:
The inclination of the line of thrust to the connecting-rod axis:
(Sum of friction circler radii / length of connecting-rod (approximately)
Friction circle at gudgeon pin - Friction circle at crankshaft
The total reaction at the guides, is inclined at to the normal.
Resolving perpendicular to .


 is the angular velocity of the body and
is the angular velocity of the body and  is the instantaneous centre of rotation , then the velocity at any point
is the instantaneous centre of rotation , then the velocity at any point  on the body is
on the body is  in a direction perpendicular to
in a direction perpendicular to  .
.
in the diagram rotate around
be
radians.
, then the angle
is The Angular Displacement of the line.
in a plane at right angles to the screen and that after a short interval of
its speed has increased to
.
 is known as the angular velocity of precession.
is known as the angular velocity of precession.
 is called the Gyroscopic acceleration.
is called the Gyroscopic acceleration. and
and  .
The change of angular velocity in a time of
.
The change of angular velocity in a time of  . This can be resolved into two components
. This can be resolved into two components  and
and  which are respectively parallel and perpendicular to
which are respectively parallel and perpendicular to  The direction of this acceleration vector is at right angles to the angular velocity vector and lies in the plane of motion of the velocity vector.
The direction of this acceleration vector is at right angles to the angular velocity vector and lies in the plane of motion of the velocity vector.is the rate of change of direction of the vector
is the rate of change of the magnitude of the velocity
Thus, if the Normal reaction is
, the limiting friction is
For given materials polished to the same standard
is found to be constant and independent of
is called the coefficient of friction.
 and radius
and radius  (Approx.
(Approx.  ) . This is known as The Friction Circle.
) . This is known as The Friction Circle. (Approx
(Approx  )
) and
and  are pivoted at
are pivoted at  and
and  on the rigid axle and are continuous with the arms
on the rigid axle and are continuous with the arms  and
and  respectively. The cross link
respectively. The cross link  is pivoted at the ends to the blocks sliding on the arms
is pivoted at the ends to the blocks sliding on the arms  and
and  .
.

 . As a result the stub axles will turn through angles of
. As a result the stub axles will turn through angles of  and
and 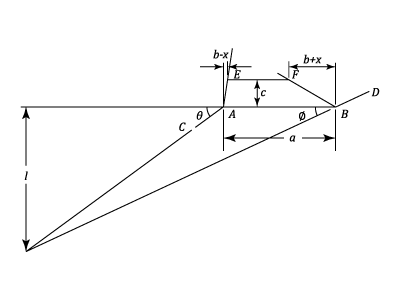
 Cross multiplying and collecting terms:
Cross multiplying and collecting terms:
 Similarly
Similarly &space;=&space;\frac{b&space;+&space;x}{c}) from which:
from which:  For Correct Steering all the wheels must have Pure Rolling Motion and as a result the Instantaneous Centre must be on the line of the Back Axle.
For Correct Steering all the wheels must have Pure Rolling Motion and as a result the Instantaneous Centre must be on the line of the Back Axle.
&space;=&space;a) Using equations (1) and (2)
Using equations (1) and (2)
}&space;=&space;\frac{a\;c}{2\;b})
 and
and  are in a plane perpendicular to
are in a plane perpendicular to  . Note angle
. Note angle  is always a right angle.
Rotate the plane of
is always a right angle.
Rotate the plane of  ' to
' to  ) is
) is 

 Differentiating,
Differentiating,  Assume that
Assume that  is constant
is constant
})
}=&space;\frac{sec^2\,\theta\:\:cos\,\alpha\:\:\omega_a}{cos^2\,\alpha\:+\:tan^2\,\theta\,}=&space;\frac{cos\,\alpha\;\;\omega_a}{cos^2\,\alpha\:\:cos^2\,\theta&space;+&space;sin^2\,\theta})
\;X\;}\omega_a) The acceleration of
The acceleration of ^2}\;X\;\omega_a)
 degrees and a steady torque of 220 lb.ft. is applied to the driving shaft whilst it is rotating at 120r.p.m., what must be the weight of the flywheel (radius of gyration 9 in.) attached to the driven shaft, if the output torque does not vary by more than plus or minus 25%?
degrees and a steady torque of 220 lb.ft. is applied to the driving shaft whilst it is rotating at 120r.p.m., what must be the weight of the flywheel (radius of gyration 9 in.) attached to the driven shaft, if the output torque does not vary by more than plus or minus 25%?

 i.e.
i.e.  or
or  and
and  or
or  Using equation (1) - from Example 1
Speed ratio =
Using equation (1) - from Example 1
Speed ratio =  at both angles
Thus the transmitted torque =
at both angles
Thus the transmitted torque =  Permissible acceleration torque,
Permissible acceleration torque,  , equals the transmitted minus the output torques
, equals the transmitted minus the output torques
\;=48\,lb.ft.) From equation (2)-from Example 1
From equation (2)-from Example 1
}&space;=&space;\left(\frac{120\,X\,2\pi}{60}&space;\right)^2\,.\,\frac{0.924\,.\,0.383^2\,.\,0.987}{(1\,-\,0.762^2\,.\,0.383^2)^2})
 i.e.
i.e. ^2\;X\;25.3)

 must be in the same plane.
must be in the same plane. from the inner dead centre the effective steam pressure on the piston is 100 lb./sq.in.
Draw a diagram to show the direction of the forces acting in the linkwork and calculate the turning moment on the crankshaft.
from the inner dead centre the effective steam pressure on the piston is 100 lb./sq.in.
Draw a diagram to show the direction of the forces acting in the linkwork and calculate the turning moment on the crankshaft.  being the thrust in the connecting rod. Note that the gudgeon pin is rotating anticlockwise relative to the small end bearing, so that
being the thrust in the connecting rod. Note that the gudgeon pin is rotating anticlockwise relative to the small end bearing, so that 
)
&space;=&space;4.647\;ft.) The inclination of the connecting rod centre line to the connecting-rod axis:
The inclination of the connecting rod centre line to the connecting-rod axis:
&space;=&space;10^{0}\,11') The inclination of the line of thrust to the connecting-rod axis:
The inclination of the line of thrust to the connecting-rod axis:
 (Sum of friction circler radii / length of connecting-rod (approximately)
(Sum of friction circler radii / length of connecting-rod (approximately)
\;0.055}{2\times&space;48}&space;=&space;16'\;\;\;\;\;\;\;\;\;\;\;\mu&space;&space;=&space;0.055)

 Friction circle at gudgeon pin - Friction circle at crankshaft
Friction circle at gudgeon pin - Friction circle at crankshaft
0.055&space;-&space;\left(\frac{5}{24}&space;\right)0.055=&space;0.802\;ft.) The total reaction at the guides,
The total reaction at the guides,  to the normal.
Resolving perpendicular to
to the normal.
Resolving perpendicular to &space;=&space;P\cos4^{0}\;34') Giving
Giving  The Turning Moment on the Crankshaft =
The Turning Moment on the Crankshaft =